App Note 5: Continuous-time Convolution Anti-aliasing for Ring Modulation
Continuous-time convolution anti-aliasing, sometimes known as antiderivative anti-aliasing (ADAA), is a technique for anti-aliasing digital audio effects. It was first introduced as a method for anti-aliasing static nonlinear waveshapers in a 2016 paper by Julian Parker, Vadim Zavalishin and Efflam Le Bivic [1]. Since then, the technique has been extended to a number of other applications in digital audio, including stateful systems [2] and even recurrent neural networks [3].
In this app note, we’ll explore using continuous-time convolution anti-aliasing on a ring modulation effect.
Background
In order to anti-alias an effect with this technique, we must first consider the continuous version of an effect. Then, we create a digital effect by:
- Applying a continuous-time low-pass filter (the reconstruction or interpolation filter)
- Applying the continuous version of our effect
- Applying a continuous-time low-pass filter (the sampling filter)
- Sampling the continuous signal
The combination of all these steps is a discrete-time effect, since both the input and output are discrete-time signals. Of course, we’ll design each step carefully to ensure that the final result is realizable and tractable.
A worked example - anti-aliasing a waveshaper
Let’s walk through using the technique to anti-alias a simple static waveshaper. This was the original application in [1], and is a simple application that will let us get comfortable with the important concepts.
The continuous-time effect
First, we define our continuous-time effect. Since this is a static waveshaper, we say , where is the input signal and is the output signal, and is some function.
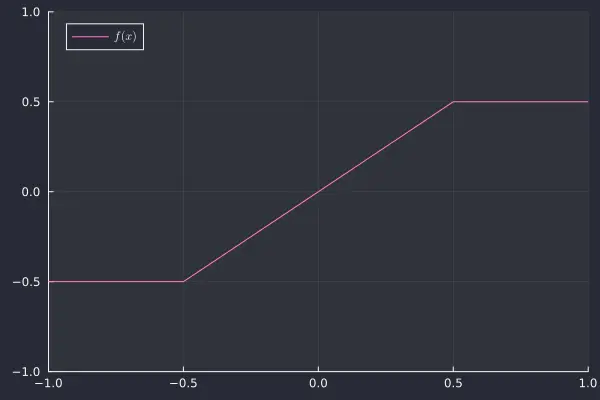
In plots, we’ll use a simple clipper function as our , but we’ll keep the math generic throughout.
Naive discrete-time effect
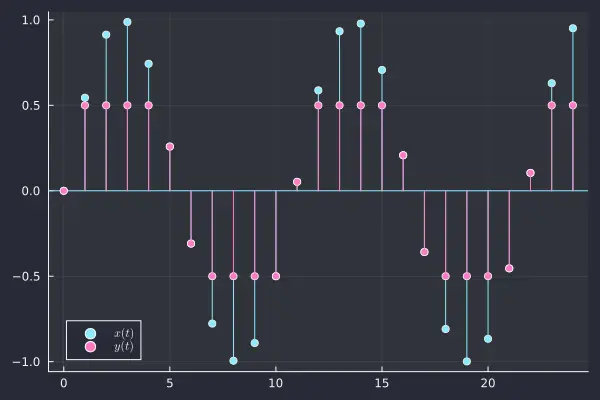
If we weren’t concerned about aliasing, we could apply the continuous-time effect to our discrete-time input signal, then sample to get back to a discrete-time signal. We can think of this process as converting our discrete input signal to a pulse train, applying the continuous-time effect, and then sampling the result. That is, we define
Where is the Dirac delta centered around (normalized such that ). Note that we’ll use the convention that samples occur at integers, that is, the sampling period is . This will make the expressions below a bit more concise. We can think of this as a unit convention, where we consider the units of continuous-time to be sampling periods.
Then we apply the continuous-time effect:
Finally, we sample the result at to get our discrete-time output signal:
This is obviously the same result as if we had considered a discrete-time waveshaper — but, as we’ll see in the next section, the conceptual shift to continuous-time is important.
Continuous-time convolution
To apply the continuous-time convolution technique, we improve on the naive approach by adding two continuous-time filters - an interpolation filter and a sampling filter. This will reduce the aliasing introduced by the sampling step of the naive approach, where we sampled a non-bandlimited signal.
We’ll introduce some notation here that we will use throughout the rest of the note.
- : the discrete-time input signal
- : the continuous-time input signal, defined as
- : with an interpolation filter applied, to be defined below.
- : with the continuous-time effect applied
- : with a sampling filter applied, to be defined below.
- : , that is, a sampled version of .
In the naive version above, since we did not apply either filter, and . The remaining work for this example is to choose real filters and calculate , , and .
We are somewhat restricted in the choice of filters, because we need the end-to-end system to be tractable. A common choice in the literature which works well in practice is to use Lagrange polynomials as filter kernels for both filters.
We’ll use a linear interpolation kernel for the interpolation filter, and a zero-order hold kernel of length for the sampling filter. Both of these can be considered to be Lagrange polynomials (of order 1 and 0 respectively).
Interpolation filter
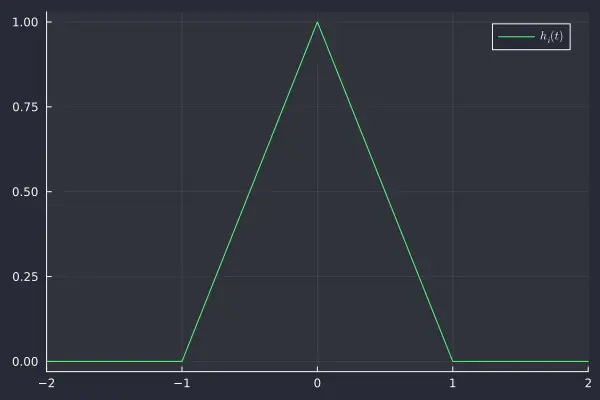
We’ll use the standard linear interpolation kernel (also the 1st order Lagrange polynomial) as our kernel.
To apply this filter, we convolve the naive input signal with .
using the definition of convolution,
using our expression for ,
doing the integral,
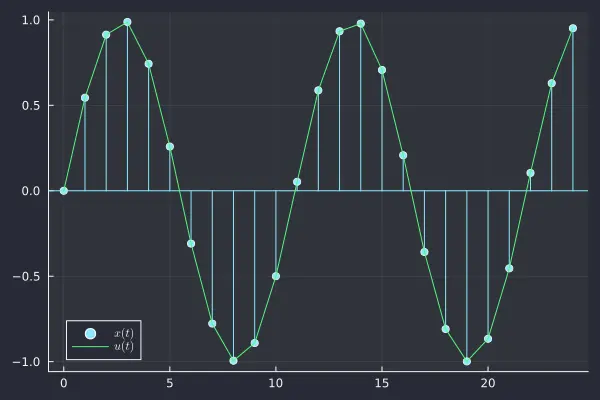
We note that this is simply a linear interpolation, so for ,
Effect
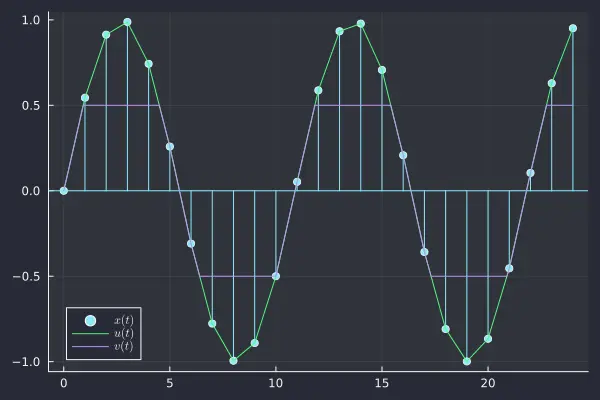
We apply the effect to this continuous signal as before,
assuming .
Sampling filter
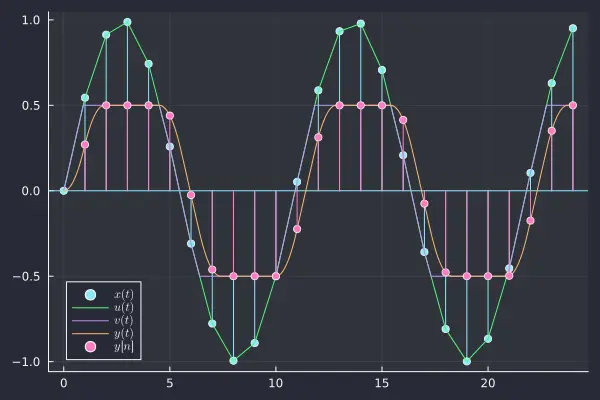
Now, we apply a sampling filter to . Here we use a zero-order hold kernel, centered around . Shifting this away from is a trick that will make the end-to-end system realizable - if we instead centered the filter at , our discrete-time system would end up having to sample between our original discrete-time samples.
To compute this analytically, we first use the definition of convolution:
Using our expression for , this simplifies to
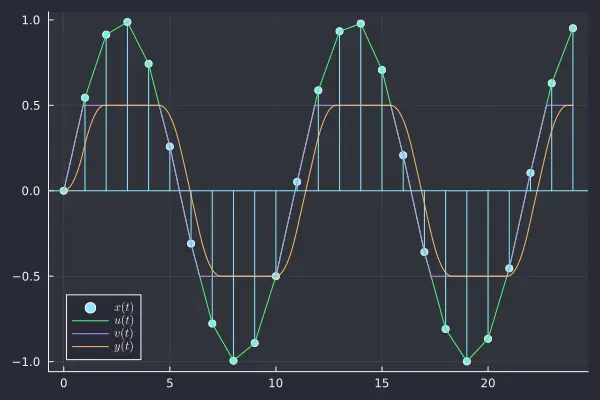
While it won’t be important in this note, it’s interesting to notice that shifting the filter to be centered at introduces a system delay - that is, is slightly shifted compared to . This effect is clearly visible in the plot above.
Sampling
Finally, we can sample the result to create a discrete-time system.
Substituting our expression for ,
Grouping terms of ,
Now, consider some function such that . For the example clipper we’ve been using in plots, one possible function would be
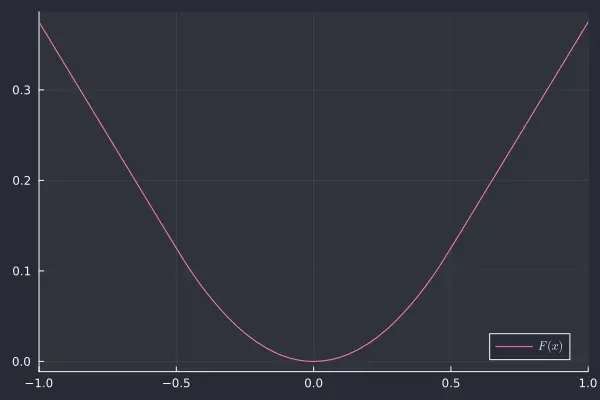
Using the chain rule for derivatives, we see that the derivative of with respect to is . Thus by the fundamental theorem of calculus,
Or, rearranging,
We’ve successfully collapsed our continuous system, with an interpolation filter, effect, and sampling filter, into a relatively simple discrete-time system. This indeed does achieve some level of anti-aliasing, as explored in [1, 4]. We now also can see why this technique is sometimes called “antiderivative anti-aliasing” - when we use a zero-order hold filter on a static nonlinear waveshaper, the antiderivative of the waveshaping function shows up in the anti-aliased expression.
It’s worth noting that this expression becomes ill-defined when . However, in this case our expression above for simplifies to .
Ring modulation
Ring modulation is a common effect in synthesizers, often used to create complex waveforms from two simple oscillators. The key idea is that the two oscillators are multiplied together. This effect is called “ring” modulation because of the traditional way to create the effect with analog circuitry (which involves a ring of diodes). For tips on modeling the diode implementation, see Julian Parker’s paper from DAFx 2011 [5]. Apart from the diode-based implementation, there are several ways to implement something like a multiplier with analog circuitry, including using a simple VCA (the subject of our own App Note 4), as in the JX-8P.
In this app note, however, we’ll focus on the simplest way to implement a ring modulation digitally - a pointwise multiplication of two signals!
We’ll follow the same continuous-time convolution framework as before, but this time our effect will have two inputs. The scheme will be to first apply interpolation filters to the two inputs separately, apply the continuous-time effect (here it will take two continuous-time signals as inputs and produce one continuous-time signal as an output), and then apply a sampling filter to the result.
Interpolation filters
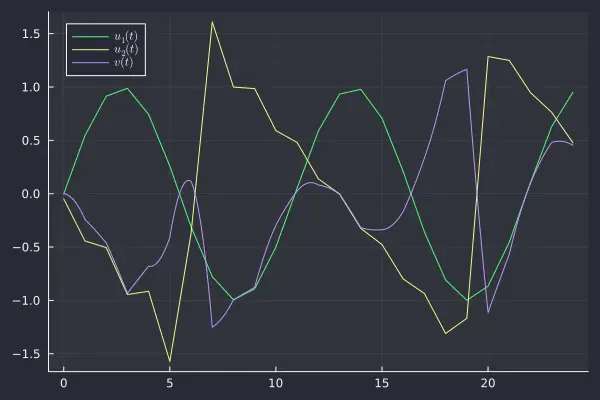
We’ll use the same interpolation filters as before, i.e., the linear interpolation kernel. Given ,
As a running example in plots, we’ll apply the effect to a sine wave and a band-limited sawtooth wave.

Continuous-time effect
For our ring modulation, our effect will just be a pointwise multiplication of the two input signals:
expanding with the assumption ,
Sampling filter
Just like before, we’ll use a zero-order hold kernel for the sampling filter.
So,
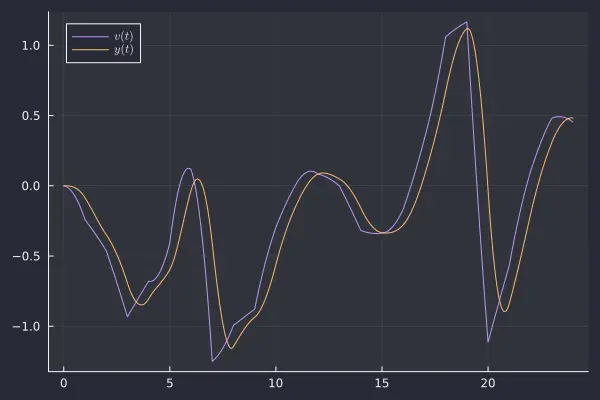
The convolution and sampling go through very similarly to the example above,
grouping terms of ,
integrating with the power rule,
Main result
Simplifying,
This is a pretty concise little expression! We can see this is similar to a simple two-sample averaging filter, but with additional “cross-terms” and mixed in.
While a full analysis of the effectiveness of this anti-aliasing scheme is out of scope for this note, we’ll quickly compare the spectrum of our test signals under:
- - a heavily oversampled implementation, representing something close to the ideal spectrum
- - the naive discrete-time implementation
- - the continuous-time convolution anti-aliasing implementation
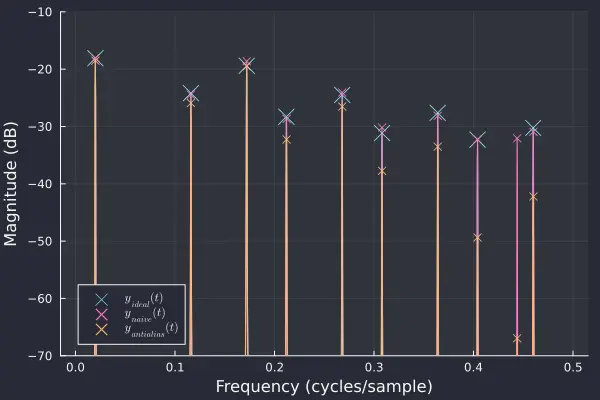
For this choice of input signals, there is a single clear aliased harmonic (which doesn’t exist in ). We see that indeed, suppresses this aliased harmonic, while largely preserving the other desired harmonics. Some desired high‑frequency harmonics are attenuated by the non‑ideal interpolation and sampling filters.
Higher-order sampling kernel
If we want slightly better anti-aliasing, we can apply the linear kernel as the sampling filter (instead of the zero-order hold kernel), that is, we can set
then our expression for becomes
using a computer algebra system (see Appendix 2), we can compute this integral at to get , a discrete-time expression.
This should slightly improve anti-aliasing performance, but requires calculating a lot more cross-terms.
Adding a nonlinearity
We can also consider the case where the ring modulation includes a nonlinearity in one of the terms. For example, in our simplified model of the transistor VCA ring modulator, we had a continuous-time expression like . Let’s consider a more general nonlinearity of , where is some nonlinear function and is some function such that , and is some function such that .
Using a linear interpolation filter and a zero-order hold sampling filter, our expression for becomes
grouping terms of ,
We have to proceed by integration by parts. We recall first from our work on the static nonlinear case that
Applying integration by parts,
The remaining integral is the exact same form as the one we solved to anti-alias the static waveshaper, so we recall the result is . Putting this all together and rearranging,
We can check this result by computing for (implying and ). Using a computer algebra system shows that the expression simplifies to our main result (see Appendix 3).
References
-
“Antiderivative anti-aliasing for stateful digital effects” by Martin Holters (DAFx 2019)
-
“Antiderivative anti-aliasing for recurrent neural networks” by Otto Mikkonen and Kurt James Werner (DAFx 2025)
-
“Practical Considerations for Antiderivative Anti-Aliasing” by Jatin Chowdhury (Published on personal CCRMA website)
-
“A Simple Digital Model of the Diode-based Ring-modulator” by Julian Parker (DAFx 2011)
Appendix 1: Code for figures
Apologies for the mess!
import Pkg
Pkg.activate(".")
Pkg.add("Plots")
Pkg.add("Interpolations")
Pkg.add("Symbolics")
Pkg.add("DSP")
Pkg.add("LaTeXStrings")
Pkg.add("FFTW")
Pkg.add("Peaks")
using Plots
using Interpolations
using DSP
using Printf
using Symbolics
using LaTeXStrings
using FFTW
using Peaks
theme(:dracula)
@variables x y
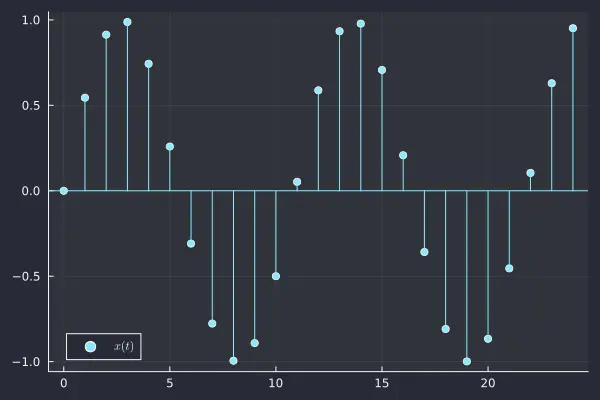
signal = sin.(2π .* range(0, 2.2, length=25))
sampled_t = 0:length(signal)-1
p = plot(sampled_t, signal, seriestype=:stem, marker=:circle, label=L"x(t)")
hline!(p, [0], label="", color=1)
savefig(p, "x.png")
clip(x) = ifelse(x < -0.5, -0.5, ifelse(x > 0.5, 0.5, x))
p = plot(clip, label=L"f(x)", ylims=(-1, 1), xlims=(-1, 1), color=2)
savefig(p, "clipper.png")
naive_output = clip.(signal)
p = plot(sampled_t, signal, seriestype=:stem, marker=:circle, label=L"x(t)")
hline!(p, [0], label="", color=1)
plot!(p, sampled_t, naive_output, seriestype=:stem, marker=:circle, label=L"y(t)", color=2)
savefig(p, "naive_y.png")
oversampling_ratio = 10000
continuous_t = range(0, step=1/oversampling_ratio, length=oversampling_ratio * (length(signal)-1) + 1)
continuous_signal = linear_interpolation(0:length(signal)-1, signal).(continuous_t)
p = plot(sampled_t, signal, seriestype=:stem, marker=:circle, label=L"x(t)")
hline!(p, [0], label="", color=1)
plot!(p, continuous_t, continuous_signal, label=L"u(t)", color=3)
savefig(p, "u.png")
clipped_continuous_signal = clip.(continuous_signal)
p = plot(sampled_t, signal, seriestype=:stem, marker=:circle, label=L"x(t)")
hline!(p, [0], label="", color=1)
plot!(p, continuous_t, continuous_signal, label=L"u(t)", color=3)
plot!(p, continuous_t, clipped_continuous_signal, label=L"v(t)", color=4)
savefig(p, "v.png")
filter_length = oversampling_ratio
box_filter = fill(1.0 / filter_length, filter_length)
filtered_clipped_continuous_signal = DSP.conv(clipped_continuous_signal, box_filter)[1:length(clipped_continuous_signal)]
sampled_filtered_clipped_continuous_signal = filtered_clipped_continuous_signal[1:oversampling_ratio:oversampling_ratio*(length(signal)-1)+1]
p = plot(sampled_t, signal, seriestype=:stem, marker=:circle, label=L"x(t)")
hline!(p, [0], label="", color=1)
plot!(p, continuous_t, continuous_signal, label=L"u(t)", color=3)
plot!(p, continuous_t, clipped_continuous_signal, label=L"v(t)", color=4)
plot!(p, continuous_t, filtered_clipped_continuous_signal, label=L"y(t)", color=5)
savefig(p, "y.png")
lin_kernel = ifelse(x < -1, 0, ifelse(x <= 0, (x + 1), ifelse(x <= 1, (1 - x) , 0)))
p = plot(lin_kernel, xlims=(-2, 2), label=L"h_i(t)", color=3)
savefig(p, "lin_kernel.png")
box_kernel = ifelse(x < 0, 0, ifelse(x <= 1, 1, 0))
p = plot(box_kernel, xlims=(-2, 2), label=L"h_s(t)", color=5)
savefig(p, "box_kernel.png")
clipper_antiderivative(z) = ifelse(z < -0.5, -0.5 * z - 0.125, ifelse(z <= 0.5, 0.5 * z ^ 2, 0.5 * z - 0.125))
p = plot(clipper_antiderivative(x), xlims=(-1, 1), label=L"F(x)", color=2)
savefig(p, "clipper_antiderivative.png")
shifted_signal = [0; signal[1:end-1]]
y_calc = (clipper_antiderivative.(signal) .- clipper_antiderivative.(shifted_signal)) ./ (signal .- shifted_signal)
p = plot(sampled_t, signal, seriestype=:stem, marker=:circle, label=L"x(t)")
hline!(p, [0], label="", color=1)
plot!(p, continuous_t, continuous_signal, label=L"u(t)", color=3)
plot!(p, continuous_t, clipped_continuous_signal, label=L"v(t)", color=4)
plot!(p, continuous_t, filtered_clipped_continuous_signal, label=L"y(t)", color=5)
plot!(p, sampled_t, y_calc, seriestype=:stem, marker=:circle, label=L"y[n]", color=2)
savefig(p, "y_calc.png")
# calculate a band-limited saw by summing harmonics
function bl_saw(cycles, limit_length, real_length)
phase_offset = 0.3
t = range(0, 1, length=real_length)
base_rate = cycles
harmonic = 1
output = zeros(real_length)
while harmonic * base_rate < limit_length / 2
output += sin.(2π .* harmonic .* base_rate .* (t .+ phase_offset)) ./ harmonic
harmonic += 1
end
return output
end
signal2 = bl_saw(1.8, 25, 25)
continuous_signal2 = linear_interpolation(0:length(signal2)-1, signal2).(continuous_t)
p = plot(sampled_t, signal, seriestype=:stem, marker=:circle, label=L"x_1(t)")
hline!(p, [0], label="", color=1)
plot!(p, sampled_t, signal2, seriestype=:stem, marker=:circle, label=L"x_2(t)", color=6)
plot!(p, continuous_t, continuous_signal, label=L"u_1(t)", color=3)
plot!(p, continuous_t, continuous_signal2, label=L"u_2(t)", color=7)
savefig(p, "u_ring.png")
v_ring = continuous_signal .* continuous_signal2
p = plot(continuous_t, continuous_signal, label=L"u_1(t)", color=3)
plot!(p, continuous_t, continuous_signal2, label=L"u_2(t)", color=7)
plot!(p, continuous_t, v_ring, label=L"v(t)", color=4)
savefig(p, "v_ring.png")
filtered_v_ring = DSP.conv(v_ring, box_filter)[1:length(v_ring)]
p = plot(continuous_t, v_ring, label=L"v(t)", color=4)
plot!(p, continuous_t, filtered_v_ring, label=L"y(t)", color=5)
savefig(p, "y_ring.png")
l = 4096
ratio = 4096 / 25
cycles1 = 1.9 * ratio
cycles2 = 2.4 * ratio
oversampling = 256
signal1_oversampled = sin.(2π .* range(0, cycles1, length=l*oversampling))
signal2_oversampled = bl_saw(cycles2, l, l*oversampling)
result_oversampled = signal2_oversampled .* signal1_oversampled .* Windows.hann(l*oversampling)
spectrum_oversampled = abs.(rfft(result_oversampled)) ./ (l*oversampling)
freqs_oversampled = rfftfreq(length(result_oversampled), oversampling)
first_index = findfirst(x -> x > 0.5, freqs_oversampled)
spectrum_oversampled = spectrum_oversampled[1:first_index]
freqs_oversampled = freqs_oversampled[1:first_index]
peaks_index_oversampled, peaks_value_oversampled = findmaxima(spectrum_oversampled)
signal1 = sin.(2π .* range(0, cycles1, length=l))
signal1_shifted = [0; signal1[1:end-1]]
signal2 = bl_saw(cycles2, l, l)
signal2_shifted = [0; signal2[1:end-1]]
result_naive = signal2 .* signal1 .* Windows.hann(l)
spectrum_naive = abs.(rfft(result_naive)) ./ l
freqs_naive = rfftfreq(length(result_naive), 1)
peaks_index_naive, peaks_value_naive = findmaxima(spectrum_naive)
result_anti_alias = (1/3 .* (signal1 .* signal2) .+
1/3 .* (signal1_shifted .* signal2_shifted) .+
1/6 .* (signal1 .* signal2_shifted) .+
1/6 .* (signal2 .* signal1_shifted)) .* Windows.hann(l)
spectrum_anti_alias = abs.(rfft(result_anti_alias)) ./ l
freqs_anti_alias = rfftfreq(length(result_anti_alias), 1)
peaks_index_anti_alias, peaks_value_anti_alias = findmaxima(spectrum_anti_alias)
p = plot(freqs_oversampled, 20*log10.(spectrum_oversampled .+ eps()),
xlabel="Frequency (cycles/sample)", ylabel="Magnitude (dB)", label="", legend=:bottomleft, ylims=(-70, -10), color=1)
plot!(p, freqs_oversampled[peaks_index_oversampled], 20*log10.(peaks_value_oversampled .+ eps()), seriestype=:scatter, marker=:xcross, label=L"y_{ideal}(t)", markersize=8, color=1)
plot!(p, freqs_naive, 20*log10.(spectrum_naive .+ eps()), label="", color=2)
plot!(p, freqs_naive[peaks_index_naive], 20*log10.(peaks_value_naive .+ eps()), seriestype=:scatter, label=L"y_{naive}(t)", marker=:xcross, color=2)
plot!(p, freqs_anti_alias, 20*log10.(spectrum_anti_alias .+ eps()), label="", color=5)
plot!(p, freqs_anti_alias[peaks_index_anti_alias], 20*log10.(peaks_value_anti_alias .+ eps()), seriestype=:scatter, label=L"y_{antialias}(t)", color=5, marker=:xcross)
savefig(p, "spectrum_comparison.png")Appendix 2: Code for calculating higher-order kernel
import Pkg
Pkg.activate(".")
Pkg.add("Symbolics")
using Symbolics
x1a, x2a, x1b, x2b, x1c, x2c, tau = @variables var"x_1[n-1]", var"x_2[n-1]", var"x_1[n]", var"x_2[n]", var"x_1[n+1]", var"x_2[n+1]", var"τ"
v1 = tau ^ 2 * (x1a * x2a) + tau * (1 - tau) * (x1a * x2b + x1b * x2a) + (1 - tau) ^ 2 * (x1b * x2b)
v2 = tau ^ 2 * (x1b * x2b) + tau * (1 - tau) * (x1b * x2c + x1c * x2b) + (1 - tau) ^ 2 * (x1c * x2c)
v = (1 - tau) * v1 + tau * v2
# collect terms by powers of tau
expanded_v = expand(v)
max_degree = Symbolics.degree(expanded_v, tau)
collected_expr = substitute(expanded_v, tau => 0)
for i in 1:max_degree
coeff_val = Symbolics.coeff(expanded_v, tau^i)
# apply power rule to integrate
collected_expr += coeff_val / (i + 1)
end
display("text/plain", expand(collected_expr))Appendix 3: Code for checking nonlinear ring modulation expression
import Pkg
Pkg.activate(".")
Pkg.add("Symbolics")
using Symbolics
x1a, x2a, x1b, x2b = @variables var"x_1[n-1]", var"x_2[n-1]", var"x_1[n]", var"x_2[n]"
f1(x) = 1 / 2 * x ^ 2
f2(x) = 1 / 6 * x ^ 3
y = 1 / (x2b - x2a) * (x1b * f1(x2b) - x1a * f1(x2a) - (x1b - x1a)/(x2b - x2a) * (f2(x2b) - f2(x2a)))
display(simplify(y))